Logické signály s úrovní 24V ss umožňují univerzální použití pro libovolný typ PLC systému. Vstupní i výstupní signály jsou definovány proti společnému zápornému vodiči. Opačnou polaritu signálů je možno řešit přizpůsobovacími členy.
Základní součásti EDU-mod
model křižovatky
model mísicí jednotky
model hydraulické posuvové jednotky
model automatické pračky
model regulace spotřeby
model nápojového automatu
propojovací modul, kabely
Vstupní a výstupní signály - připojení k řídicímu systému
Vstupní a výstupní signály EDU-mod jsou vyvedeny na 20 pólový konektor zajišťující propojení plochým kabelem s rozbočovacím modulem s mechanickým provedením shodným s periferiemi EDUtec. Rozbočovač obsahuje 4 konektory Cannon 9 (2 vstupní, 2 výstupní), pro připojení max. 8 vstupních a 8 výstupních binárních signálů z/do libovolného systému. Chceme-li tedy použít zvolený model, stačí jej kabelem připojit a do odpovídajících konektorů zapojit řídicí systém (např. EDUtec).
Popis jednotlivých modelů
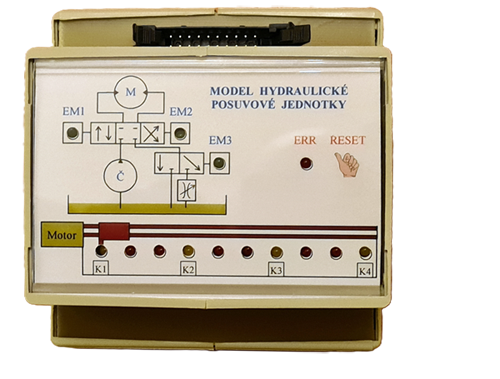
Model hydraulické posuvové jednotky
Aktivní modul s vlastní inteligencí, t.j. obsahuje vlastní mikroprocesorovou desku zpracovávající signály z řídicího automatu, ovládající panel LED, generující stavové signály snímačů polohy a chybová hlášení.
Model je řízen třemi výstupními signálovými bity logického automatu. Výstup EM1 řídí pohyb suportu vpřed, EM2 řídí pohyb vzad a EM3 ovládá dvoupolohově rychlost.
Pohyb suportu je simulován pomocí LED, poloha je snímána čtyřmi senzory.
Model křižovatky
Pasivní modul, který zobrazuje pomocí LED stavy výstupních signálů řídícího automatu.
Pomocí přídavných vstupních jednotek (např. modulu spínačů a tlačítek systému EDUtec Foxtrot) je možné modifikovat běh programu, realizovat tlačítko „chodci“ atd.
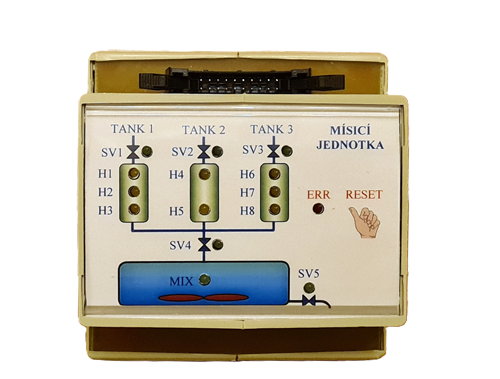
Model mísicí jednotky
Aktivní model simulující funkci mísicí jednotky složené ze tří plnicích tanků a mísicí nádoby. Jednotka je řízena šesti binárními výstupy PLC (5 solenoid. ventilů, mixér), vnitřní procesorová jednotka ovládá LED, simuluje funkci snímačů hladiny a generuje chybová hlášení.
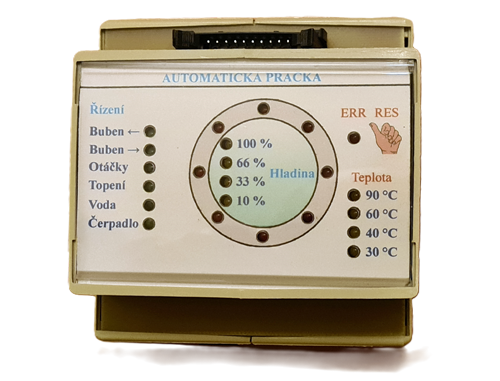
Model automatické pračky
Aktivní model s vlastním procesorem je řízen šesti signály z logického automatu. Vnitřní procesorová jednotka ovládá LED simulující otáčení bubnu pračky a generuje signály snímačů výšky hladiny a teploty. Chybová hlášení jsou signalizována podobně jako u ostatních modulů.
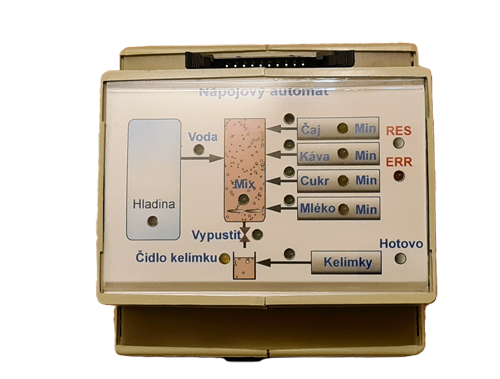
Model nápojového automatu
Nápojový automat je aktivní model s vlastní inteligencí simulující funkci zařízení na výrobu kávy a čaje.
Model je řízen 8 binárními výstupy PLC (5 dávkovacích ventilů, vypouštěcí ventil, mixér a podavač kelímků), jejichž stav je na modelu zobrazován pomocí LED. Vnitřní procesorová jednotka ovládá LED snímače obsahu zásobníků, přítomnosti kelímku a generuje chybová hlášení.
Prázdné zásobníky a přítomnost kelímku jsou snímány a zobrazovány pomocí LED. Informace je samozřejmě také posílána na výstupy modelu (vstupy PLC).
Připravený nápoj je možné odebrat stiskem tlačítka Hotovo.
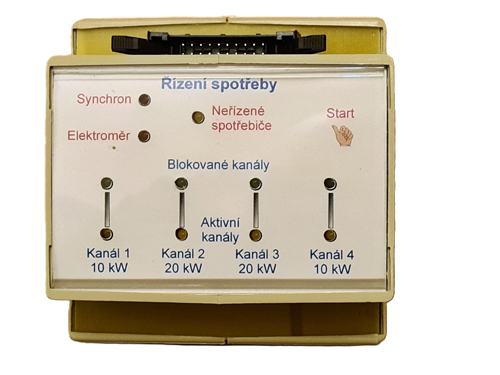
Model řízení spotřeby
Model simuluje funkci objektu, u kterého řídíme spotřebu elektrické energie (čtvrthodinová maxima). Model je řízen logickými signály z libovolného systému, které podle zvoleného algoritmu blokují čtyři náhodně spínané spotřebiče. Vnitřní procesorová jednotka simuluje funkci impulsního elektroměru a generuje synchronizační signál intervalu měření spotřeby. Interval je z praktických důvodů zkrácen na 5 minut.
Připravili jsme pro vás tutoriál s řadou příkladů pro PLC systém Foxtrot společnosti Teco a.s.. Řízenými objekty budou výše uvedené modely procesů EDU-mod