Základní algoritmus řízení modelu posuvové jednotky
Úkol této kapitoly:
založit projekt s danou HW konfigurací
zjistit mapování vstupů/výstupů
nastavit potřebné aliasy
vytvořit program v LD
program odladit
Zadání úlohy Režim 1: Sestavte program pro řízení modelu posuvové jednotky v následujícím režimu: Po stisku tlačítka START se suport rozjede vpřed směrem ke K4, kde se zastaví a okamžitě se rozjíždí zpět. Cyklus končí po dojetí na K1, může být také kdykoli ukončen stiskem tlačítka STOP. Režim 2: Od režimu 1 se liší rychlostí při pohybu vpřed. Mezi snímači K2 a K3 jede suport pracovní rychlostí (EM3=1).
Založení nového projektu
Spustíme vývojové prostředí Mosaic a využijeme projekt vytvořený v minulé lekci. Je uložený v záložce Předchozí projekty.
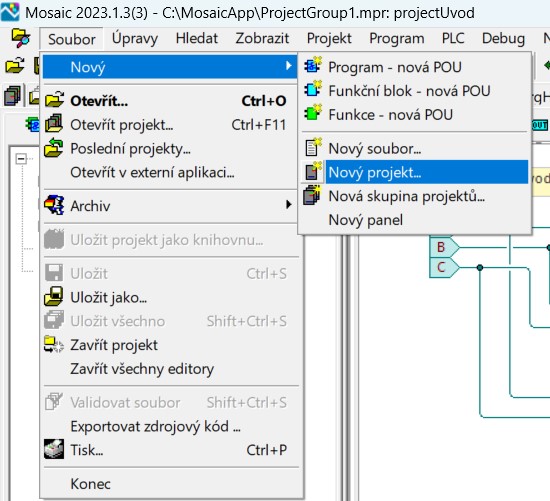
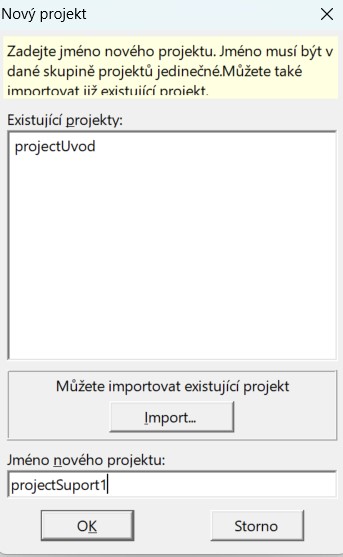
Z menu Soubor vybereme Nový, projekt pojmenujeme a vytvoříme stejnou konfiguraci jako v minulé kapitole.
Založíme program, nazveme ho např. prgPosuv, zvolíme jazyk LD a deklarujeme instanci programu.
Projekt přeložíme a spustíme režim RUN. Dalším krokem je mapování vstupů/výstupů a vytvoření Alias.
Vytvoření Alias
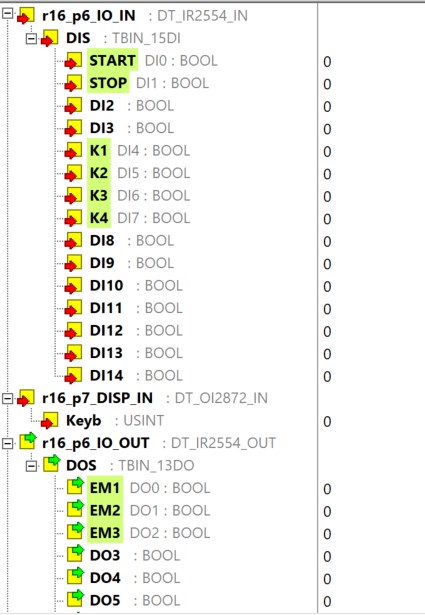
Začneme mapováním výstupů. Vybereme libovolný digitální výstup a ve sloupci DATA zapíšeme 1 a potvrdíme. Přitom sledujeme funkci přípravku. Jakmile se rozsvítí LED některého aktoru, zapíšeme Alias.
Dalším krokem je mapování vstupů. START a STOP zjistíme stiskem některého z tlačítek modulu EDUtec. Koncové snímače polohy aktivujeme po rozjezdu suportu. Doporučuji zapnout EM1 a EM3 – tím rozjedeme suport vpřed a budeme mít čas na sledování aktivace příslušných vstupů. Zapíšeme Alias a výsledek může vypadat jako na obrázku (záleží na vaší konfiguraci a připojení modelu
Program pro pohyb vpřed
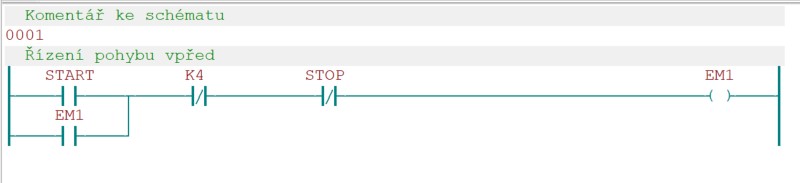
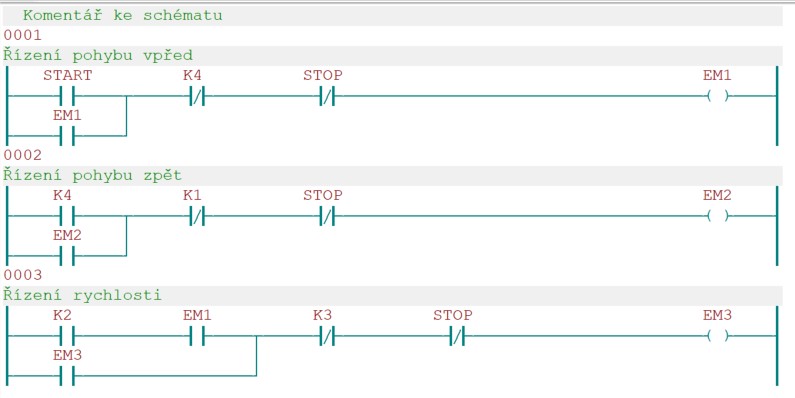
Kontaktní schéma vidíme na obrázku. Rozpínací kontakt K4 a STOP slouží k zastavení pohybu, Paralelní řazení EM1 k tlačítku START slouží jako tzv, přídržný kontakt.
Program pro pohyb vzad
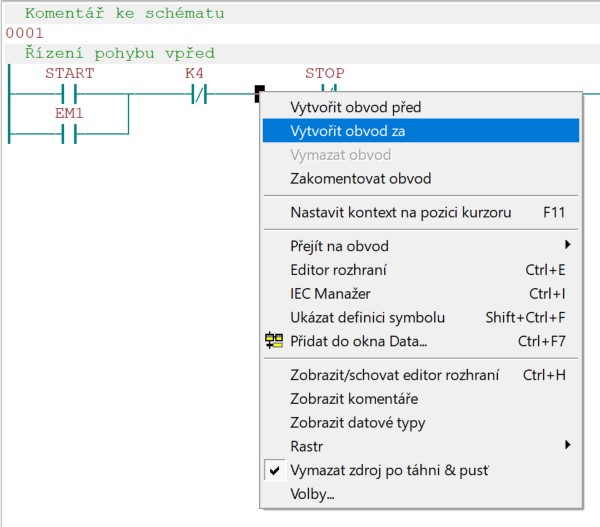
Přidáme další příčku příkazem Vytvořit obvod za (z lokálního menu pravého tlačítka myši). a stejným postupem vytvoříme obvod pro řízení pohybu zpět.
Můžeme přeložit, nahrát do PLC a vyzkoušet funkčnost.
Program pro řízení rychlosti
Na závěr přidáme další obvod pro řízení rychlosti. Využijeme výstup EM3
EM3 = 0 ….. rychloposuv
EM3 = 1 …… pracovní posuv
EM3 spíná na K2 pouze při pohybu vpřed – proto sériový kontakt EM1.
Program je kompletní – můžeme přeložit, vyslat do PLC, spustit RUN a odladit.
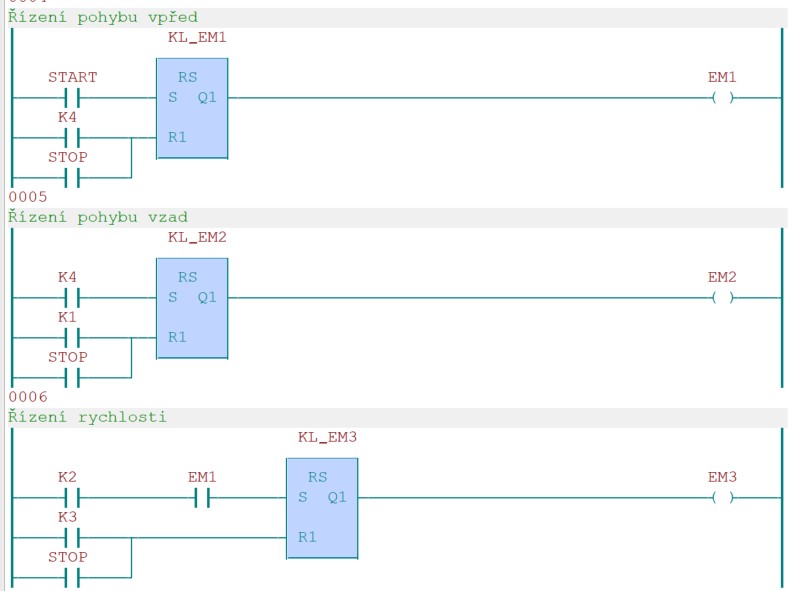
Použití RS klopných obvodů
V našem příkladu jsme paměťové funkce realizovali přídržnými kontakty. Osobně k těmto účelům preferuji klopné obvody, které z principu paměťovou funkci mají. Mosaic ve své knihovně nabízí 2 typy klopných obvodů, které se liší jen prioritou vstupu S a R.
V našem příkladu použijeme pro každý výstup jeden klopný obvod, kterému nastavíme podmínky pro zapnutí a vypnutí
Vyjdeme z našeho programu, kde zakomentujeme
všechny příčky – pravé tlačítko myší a příkaz Zakomentovat obvod
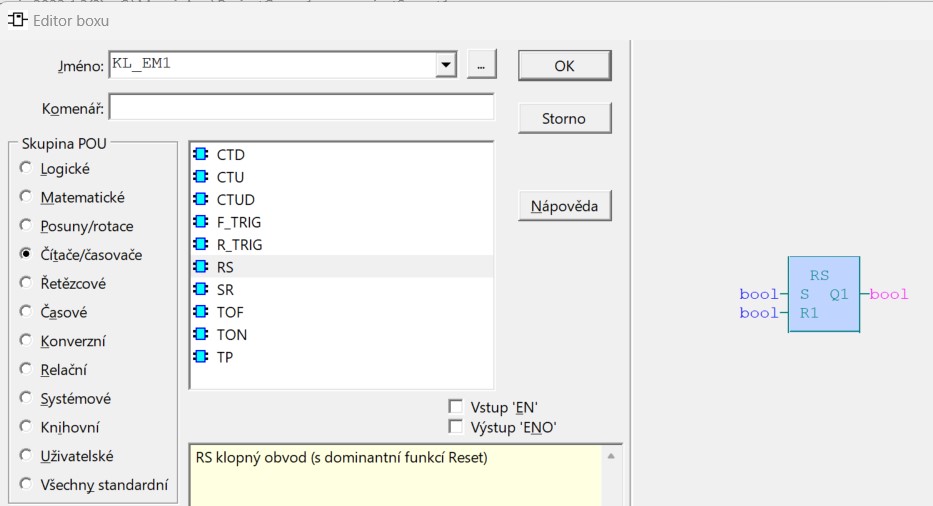
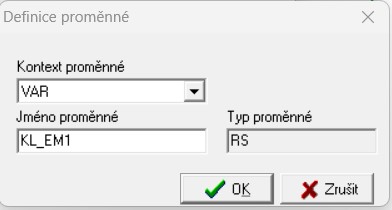
Připravíme si tři prázdné příčky (vložit obvod za) a z nástrojové lišty vybereme zelenou ikonu Vložit box a umístíme ho do prvního obvodu. Tím vyvoláme Editor boxu, vybereme Čítače/časovače a zvolíme RS klopný obvod. Musíme mu dát jméno – instanci.
Důležité Klopné obvody musí mít unikátní jména.
Pokud pojmenujete dvě a více instancí stejně, nebude program fungovat správně
Náš program vidíme na obrázku, po překladu, nahrání do PLC a spuštění musí fungovat stejně jako předchozí verze s přídržnými kontakty. Je věcí programátora a jeho preferencí, kterou metodiku zvolí
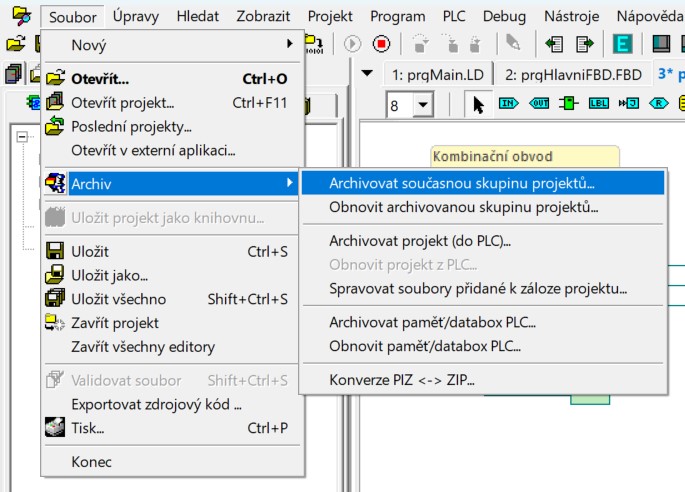
Archivace projektové skupiny
Nezapomeneme na základní pravidlo programátora:
zálohuj, zálohuj, zálohuj a vytvoříme archiv projektové skupiny.
Pokračování V příští kapitole tutoriálu zůstaneme u modelu hydraulické posuvové jednotky systému EDU-mod a do našeho programu přidáme časové funkce.
Dotazy k této kapitole pište do formuláře v úvodu tutoriálu.